
 العربية
العربية English
English français
français Deutsch
Deutsch español
español 中文
中文
تاريخ تعويض القوة التفاعلية
إذا كنت تعمل في صناعة الطاقة ، فلا بد أنك سمعت عن تعويض الطاقة التفاعلية . لكنك قد لا تعرف الكثير عنها.
ما هو تعويض القدرة التفاعلية؟
نحن نعلم أن ناتج الطاقة لشبكة الطاقة يشتمل على جزأين: الأول ، الطاقة النشطة: تستهلك الطاقة الكهربائية بشكل مباشر ، وتحول الطاقة الكهربائية إلى طاقة ميكانيكية ، أو طاقة حرارية ، أو طاقة كيميائية ، أو طاقة صوتية ، واستخدام هذه الطاقة لإنجاز العمل. هذا الجزء من السلطة يسمى القوة النشطة ؛ والثاني هو الطاقة التفاعلية: فهي تستهلك الطاقة الكهربائية ، ولكنها تحولها فقط إلى شكل آخر من أشكال الطاقة. تعتبر هذه الطاقة شرطًا ضروريًا لتشغيل المعدات الكهربائية ، ويتم تحويل هذه الطاقة بشكل دوري بالطاقة الكهربائية في شبكة الطاقة. يسمى هذا الجزء من الطاقة بالطاقة التفاعلية (مثل الطاقة الكهربائية التي تشغلها المكونات الكهرومغناطيسية لإنشاء المجالات المغناطيسية ، والطاقة الكهربائية التي تشغلها المكثفات لإنشاء المجالات الكهربائية).
يمكن التعبير عن القوة التفاعلية كـ
Q = S sin ϕ Q = VI sin ϕ Q = P tan ϕ حيث S = القوة الظاهرة و P = القوة النشطة.

التاريخ

كما هو موضح في الرسم التخطيطي لتصنيف تعويض الطاقة التفاعلية أعلاه ، نظرًا لمشاكل تكلفة تصنيع المعدات واستهلاك طاقة المعدات ، بدأت تقنية تعويض الطاقة التفاعلية الثابتة في استبدال تقنية تعويض الطاقة التفاعلية الدوارة في السبعينيات ، والآن ثلاثة أجيال من الابتكار التكنولوجي لديها نفذت.
الجيل الأول
أجهزة التعويض السلبي ذات التبديل الميكانيكي هي أجهزة تعويض تفاعلية بطيئة ، والتي يتم التخلص منها بشكل أساسي في الوقت الحاضر.
الجيل الثاني
معوض var ثابت مع تبديل الثايرستور ، والذي ينتمي إلى جهاز تعويض var سريع سلبي. في الوقت الحالي ، يتم استخدام TCR و TSC بشكل أساسي في السوق ، ولكن العيب هو أنهما عرضة للتعويض الزائد وتحت التعويض ، وتمدد السعة غير الملائم ، وتبديد الحرارة الكبير لخزانة المكثف ، وما إلى ذلك. TCR: يضبط TCR زاوية الزناد للثايرستور α تحقيق الضبط المستمر للقوة التفاعلية لجهاز التعويض. باستخدام الطاقة التفاعلية الحثية التي تمتصها دائرة TCR ، يمكن تعويض القوة التفاعلية ديناميكيًا ، بحيث يمكن موازنة الطاقة التفاعلية الزائدة في المرشح المتوازي ، ويكون الجهد عند نقطة التعويض قريبًا من الحفاظ على حالته دون تغيير. يظهر تكوينه الأساسي في الشكل أدناه.

TSC: بشكل عام ، تم تصميم مرشح الفروع المتعددة وفقًا لنسبة معينة ، وهي بالسعة عند التردد الأساسي ، ويتغير خرج الطاقة التفاعلية لجهاز التعويض على مراحل. يقوم فرع المرشح بإزاحة وضبط التوافقيات تحت بعض التوافقيات ، ويقوم بتصفية التوافقيات في نفس الوقت. لا يمكن تبديل TSC إلا في مجموعات ويجب تنسيقه مع TCR من أجل الضبط المستمر. يحتوي TSC على ثلاث دوائر أساسية ، كما هو موضح في الشكل. يوضح الشكل الأيسر النجمة ذات الاتصال المحايد ، ويوضح الشكل الأوسط الاتصال الخارجي للمثلث ، والذي يُسمى الاتصال الخارجي الزاوي ، ويوضح الشكل الأيمن الاتصال الداخلي للمثلث ، والذي يُسمى الاتصال الداخلي الزاوي. على أساس هذه الدوائر الثلاث ، يتم اشتقاق العديد من الهياكل الأخرى ، مثل استبدال الثايرستور في كل مرحلة بصمام ثنائي ، أو إزالة مفتاح الثايرستور للمرحلة لتوفير التكلفة. يجب النظر في اختيار الهيكل بشكل شامل بالاقتران مع الوضع الفعلي للحمل في الموقع والعوامل التقنية والاقتصادية.

الجيل الثالث
Static Var Generator (SVG ، إلخ) لمحول الانعكاس الذاتي هوأفضل جهاز تعويض varفي الوقت الحالي. يعمل هذا النوع من الأجهزة عادةً عن طريق توصيل دائرة الجسر ذات التبديل الذاتي بالتوازي مع شبكة الطاقة. من خلال تعديل الطور والسعة لجهد الخرج على جانب التيار المتردد لدائرة الجسر ، أو التحكم المباشر في تيار جانب التيار المتردد ، يمكن للدائرة امتصاص أو إرسال تيار تفاعلي يلبي المتطلبات ، وذلك لتحقيق الغرض من التفاعل الديناميكي تعويض القوة.
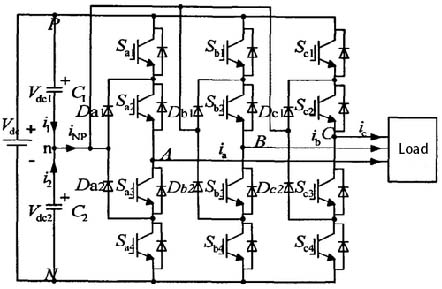
رسم تخطيطي للدائرة الأساسية من مستويين رسم تخطيطي للدائرة الأساسية بثلاثة مستويات
حلول جودة الطاقة من YT
بناءً على مبدأ عاكس مصدر الجهد ، YTPQC-SVGيعتمد مولد var الاستاتيكي ترانزستور ثنائي القطب معزول البوابة (IGBT) للتحكم في سعة ومرحلة جهد التيار المتردد للعاكس ، وذلك لتحقيق تعويض الطاقة التفاعلية وتوازن الحمل ثلاثي الأطوار. نظرًا لأن تردد التحويل لـ IGBT مرتفع جدًا (يصل إلى 25.6 كيلو هرتز) ، يمكن لـ SVG تعويض الحمل التفاعلي السريع وتحقيق تعويض عالي الدقة. SVG هو أفضل منتج في مجال التحكم في القدرة التفاعلية.






 دعم شبكة IPv6
دعم شبكة IPv6